Efficient Multi-task Uncertainties for Joint Semantic Segmentation and Monocular Depth Estimation
Apr 24, 2025· ,,,·
0 min read
,,,·
0 min read
Dr. Steven Landgraf
Markus Hillemann
Theodor Kapler
Markus Ulrich
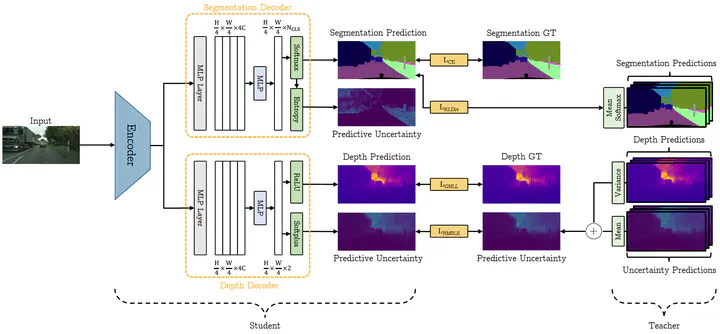 Image credit: Dr. Steven Landgraf
Image credit: Dr. Steven LandgrafAbstract
Quantifying the predictive uncertainty emerged as a possible solution to common challenges like overconfidence, lack of explainability, and robustness of deep neural networks, albeit one that is often computationally expensive. Many real-world applications are multi-modal in nature and hence benefit from multi-task learning. In autonomous driving or robotics, for example, the joint solution of semantic segmentation and monocular depth estimation has proven to be valuable. To this end, we introduce EMUFormer, a novel student-teacher distillation approach for efficient multi-task uncertainties in the context of joint semantic segmentation and monocular depth estimation. By leveraging the predictive uncertainties of the teacher, EMUFormer achieves new state-of-the-art results on Cityscapes and NYUv2 and additionally estimates high-quality predictive uncertainties for both tasks that are comparable or superior to a Deep Ensemble despite being an order of magnitude more efficient.
Type
Publication
In DAGM German Conference on Pattern Recognition